| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
1. LOSLEGEN
![]()
DU LERNST HIER... |
wie du mit Python ein Programm entwickeln und auf dem Calliope ausführen kannst. |
PROGRAMMENTWICKLUNG |
| Ein Programm, das auf dem Calliope laufen soll, kannst du mit TigerJython auf irgendeinem Computer entwickeln. Nachdem du das Programm im Editor geschrieben hast, lädst du es über ein USB-Kabel auf den Calliope hinunter und es wird dort mit MicroPython (einer reduzierten Python-Version) ausgeführt. Dazu muss auf dem Calliope eine Firmware installiert sein. |
USB-VERBINDUNG |
|

FIRMWARE INSTALLIEREN |
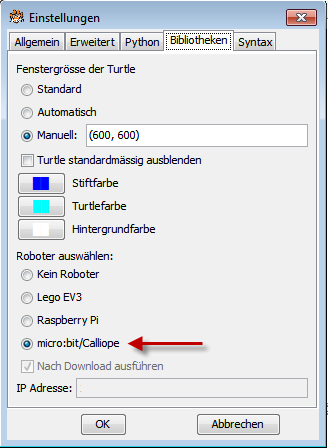
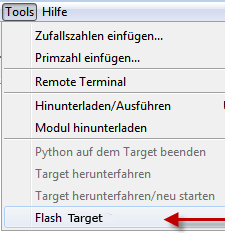
Vor der ersten Verwendung musst du den Calliope flashen. Dabe wird die Firmware und die zusätzlichen Bibliotheken auf den Calliope kopiert. Wähle unter Einstellungen/Bibliotheken die Option micro:bit/Calliope. Diese Einstellung bleibt gespeichert und ist auch für das Hinunterladen der Programme erforderlich. Wähle im Menü unter Tools die Option Flash Target .
Bemerkung: Falls es nicht funktioniert, konsultiere die Webseite https://calliope.cc/en/faq Die Zusatzmodule findest du unter cpmodules.zip. Die gewünsten Module kannst du mit Tools/Modul herunterladen auf den Calliope kopieren. |
MUSTERBEISPIEL |
Zum Einstieg schreibst du nur einen kurzen Text auf dem Display aus. Tippe im Editor das unten stehende Programm ein oder klicke auf In Zwischenablage kopieren und füge es mit Ctrl+V im Editorfensterein.
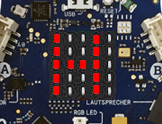
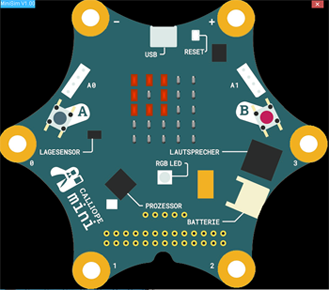
Neben dem TigerJython-Fenster erscheint ein zweites Terminal-Fenster. Hier werden Mitteilungen und Fehlermeldungen angezeigt. Wenn HALLO PYTHON als Scrolltext angezeigt wird, funktioniert dein Calliope einwandfrei. Der Programmcode ist leicht zu verstehen: In der ersten Programmzeile wird das Modul calliope_mini importiert und die Objekte und Funktionen aus dieser Bibliothek bereit gestellt, beispielsweise das Objekt display, mit dem du auf die LEDs zugreifst. Mit dem Befehl display.scroll("HELLO PYTHON!") kannst du kurze Mitteilungen als Lauftext anzeigen. Beachte, dass der Text in einfachen oder doppelten Anführungszeichnen stehen muss! |

SIMULATIONSMODUS |
|

MERKE DIR... |
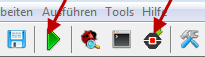
Du schreibst ein Programm für den Calliope im TigerJython-Editor. Um das Programm auf dem Calliope auszuführen, klickst du auf die Schaltfläche Hinunterladen/Ausführen. Die Programmausführung im Simulationsmodus wird mit Klick auf den grünen Pfeil gestartet.
Auf dem Calliope ist jeweils das zuletzt hinuntergeladene Programm gespeichert. Die Programmausführung startet automatisch beim nächsten Anschluss einer Stromversorgung. Sollte einmal das gespeicherte Programm wegen eines Programmierfehlers den Calliope blockieren, so musst du den Calliope neu flashen. |
ZUM SELBST LÖSEN |
|
ZUSATZBEMERKUNGEN |
VERWENDUNG DES ONLINE-EDITORS |
Die meisten Beispiele und Aufgaben kannst du auch im Browser mit TigerJython für den Web: https://webtigerpython.ethz.ch ausühren (Anleitung siehe unter https://python-online.ch/calliope). |
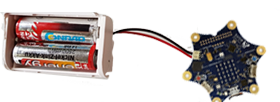
EXTERNE STROMVERSORGUNG |
Um ein Programm mehrmals auszuführen, kannst du auch den Reset-Button klicken, der sich neben der USB-Buchse befindet, statt die Spannungsversorgung zu unterbrechen. |

Fachliche Hinweise:
Falls du Schwierigkeiten mit dem USB-Anschluss hast, versuche es mit einem anderen USB-Kabel. Einige USB-Kabel, insbesondere diejenigen, die mit PowerBanks mitgeliefert werden, können nur zum Laden und nicht für die Datenübertragung verwendet werden.
Fachliche Hinweise:
Die Firmware kann wie ein kleines Betriebssystem aufgefasst werden, das auch für die Kommunikation mit dem Entwicklungssystem verantwortlich ist (Der micro:bit erscheint auf dem PC wie ein externer Speicherdevice und kann Daten als serielles Gerät (COM-Port) austauschen). Zudem enthält die Firmware den MicroPython-Interpreter und das API für die Ansteuerung der Hardware.
Die Firmware ist in C++ geschrieben und steht als public domain zur Verfügung. Wir haben sie leicht modifiziert, damit Fehlermeldungen nicht mehr auf dem LED-Display ausgeschrieben werden, was den Entwicklungsprozess stark behindert.