| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
| Deutsch English |
ANHANG: 7-SEGMENT DIGITALANZEIGE
![]()
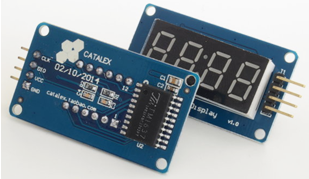
BESCHAFFUNG UND ANSCHLUSS |
Es wird ein spezielles Protokoll verwendet (ähnlich, aber nicht gleich wie I2C). Es gibt viele Bezugsquellen (Arduino/Raspberry Pi-Lieferanten, Seed/Grove, eBay, der Preis schwankt zwischen $1 und $10). Es ist darauf zu achten, dass der Display auf für 3V spezifiziert ist, einige funktionieren nur mit einer Versorgungsspannung von 5V.
|
TYPISCHE BEISPIELE |
|
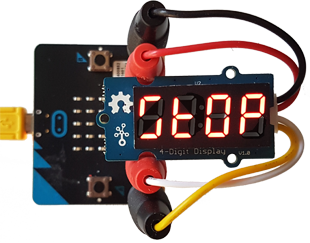
1. Von 0 bis 9999 hochzählen Zuerst wird mit d = FourDigit(pin0, pin1) ein Displayobjekt (eine Instanz) erzeugt. Dabei werden die Anschlussports für CLK und DIO angegeben. (Lässt du die Parameter weg, so wird pin0 für CLK und pin1 für DIO angenommen.) Die Methode show(text) kann auch direkt Integers anzeigen. |
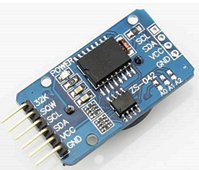
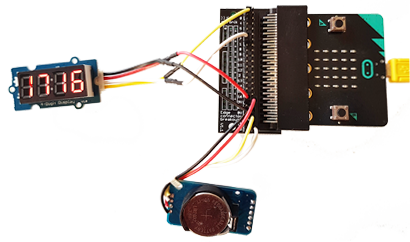
from mb7seg import FourDigit from microbit import * d = FourDigit(pin0, pin1) for n in range(10000): d.show(n) Du erkennst, dass für die Anzeige einer einzelnen Zahl ungefähr 30 ms benötigt wird. Mit einer Formatangabe, kannst du die Zahlen rechtsbündig ausschreiben: d.show("%4d" %n). 2. Die Beschleunigung anzeigen Die Digitalanzeige wird vielfach eingesetzt, um Messwerte eines Sensors anzuzeigen, beispielweise die x-Komponente der Beschleunigung. Dazu pollst du in einer Endlosschleife den Sensorwert und schreibt in aus. Mit einem sleep() wählst du die Periode des Messzyklus, musst aber beachten, dass auch die anderen Aufrufe im Schleifenkörper Prozessorzeit benötigen. from mb7seg import FourDigit from microbit import * d = FourDigit() while True: acc = accelerometer.get_x() d.show(acc) sleep(100) Hier wird der Displayinstanz ohne Parameterwerte erstellt und dabei vorausgesetzt, dass sich die Anschlüsse CLK und DIO bei P0 und P1 befinden. Für Dezimalzahlen wird zuerst mit einer Formatangabe eine vierziffrige Zahl mit 2 Dezimalstellen und Vornullen angefordert (in der Längenangabe wird der Dezimalpunkt mitgezählt). Dann muss der Dezimalpunkt entfernt werden, da dieser ja mit dem Doppelpunkt simuliert wird. Im Programm wird die Beschleunigung in m/s2 ausgeschrieben. from mb7seg import FourDigit from microbit import * d = FourDigit() d.setColon(True) while True: acc = accelerometer.get_x() / 100 v = "%05.2f" %acc v1 = v.replace(".", "") d.show(v1) sleep(100) 3. Eine Eingabeaufforderung anzeigen Nach dem Start bleibt das Programm in einer Wiederholschleife hängen, bis der Benützer den Button A klickt. Dabei wird der Prompt-Text in Laufschrift ausgeschrieben. Es wäre dabei ungünstig, die blockierende Methode scroll() zu verwenden, da der Benützer nach dem Klicken des Buttons warten müsste, bis der ganze Text fertig angezeigt ist. Vielmehr ist es angebracht, mit toLeft() den Text zu Scrollen, damit du immer wieder prüfen kannst, ob der Buttonklick erfolgt ist. Um aus den Wiederholschleifen "auszubrechen", verwendest du zweimal break. from mb7seg import FourDigit from microbit import * d = FourDigit() d.show("Press A to start") while True: while d.toLeft() > 0 and not button_a.is_pressed(): sleep(300) if button_a.is_pressed(): break d.toStart() sleep(500) d.show("Go") Hier darfst du nicht button_a.was_pressed() verwenden, da du damit nicht zweimal hintereinander True erhältst, wenn du nur einmal klickst. 4. Die Uhrzeit anzeigen Mit einem billigen Clock-Module (Real Time Clock, RTC), kannst du aus deinem micro:bit eine präzis laufende digitale Uhr machen. Das Modul verwendet ein Board mit dem DS3231 Chip. Es gibt viele Bezugsquellen (Arduino/Raspberry Pi-Lieferanten, Grove, eBay, der Preis schwankt zwischen $1 und $10). Das Module verwendet das I2C-Protokoll mit den 4 Anschlüssen GND, VCC, SCL und SDA.
from microbit import * s = 0 # Seconds m = 33 # Minutes h = 15 # Hours w = 2 # Day of week (Sunday = 1) dd = 3 # Day mm = 11 # Month yy = 2018 # Year def dec2bcd(dec): tens, units = divmod(dec, 10) return (tens << 4) + units addr = 0x68 t = bytes([s, m, h, w, dd, mm, yy - 2000]) for i in range(0,7): i2c.write(addr, bytes([i, dec2bcd(t[i])])) print("Datetime set to %d-%d-%d %d:%d:%d" %(dd, mm, yy, h, m, s)) Dein Uhrenprogramm sendet mit i2c.write() dem RTC-Modul den Befehl, die Datumszeit zurück zu geben und liest sie mit buf = i2c.read() wiederum im BCD-Format in einen Buffer. Nach der Umwandlung ins Dezimalformat stellst du Stunden und Minuten auf der Siebensementanzeige dar und lässt noch ungefähr alle Sekunden den Doppelpunkt blinken. from mb7seg import FourDigit from microbit import * def bcd2dec(bcd): return ((bcd & 0xf0) >> 4) * 10 + (bcd & 0x0f) d = FourDigit() showColon = False while True: addr = 0x68 i2c.write(addr, b'\x00') buf = i2c.read(addr, 7) mm = bcd2dec(buf[1]) hh = bcd2dec(buf[2]) d.show("%02d%02d" %(hh, mm)) # show leading zeros if showColon: d.setColon(False) showColon = False else: d.setColon(True) showColon = True sleep(1000)
|
API DOKUMENTATION MODUL mb7seg |
| Modul import: Klasse FourDigit
|
Fachliche Hinweise:
Aus den drei Beschleunigungskomponenten kannst du die Winkel Pitch und Roll berechnen. Starte das folgende Programm und kippe das Board seitwärts bzw. nach vorne und hinter. Im Terminalfenster werden die Drehwinkel in Grad ausgeschrieben.
from microbit import * from math import * def getPitch(): a = accelerometer.get_values() pitch = atan2(a[1], -a[2]) return int(degrees(pitch)) def getRoll(): a = accelerometer.get_values() anorm = sqrt(a[0] * a[0] + a[1] * a[1] + a[2] * a[2]) roll = asin(a[0] / anorm) return int(degrees(roll)) while True: pitch = getPitch() roll = getRoll() print("p: " + str(pitch)) print("r: " + str(roll)) print() sleep(100)