| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
| Deutsch English |
EINRICHTEN
![]()
ZUSAMMENBAU |
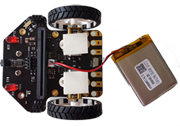
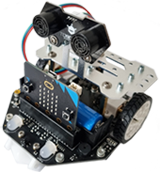
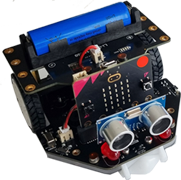
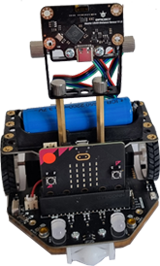
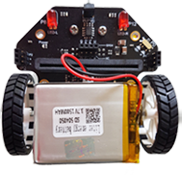
Der Maqueen Bausatz enthält eine 8 x 8.5 cm grosse Platine, an der bereits Motoren, LEDs, Infrarot- und Ultraschalsensoren und weitere Komponenten eingebaut sind.
|

|
|
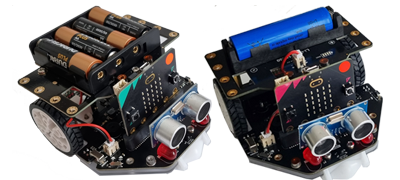
Eine aufladbare Batterie ist vorteilhaft. Zusätzlich muss ein micro:bit V2 beschafft werden.
|
Einige Tipps zur Beschaffung |
FIRMWARE INSTALLIEREN |
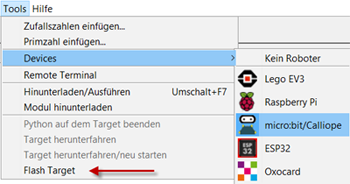
Die Programme werden mit TigerJython entwickelt, via USB-Kabel auf den micro:bit des Roboters hinunterladen und dort mit Python ausgeführt. Vor der ersten Verwendung muss du auf dem micro:bit eine Firmware installieren.
Hast du Schwierigkeiten beim Flashen vom micro:bit V1 auf einem Mac-Computer?
|
MAQUEEN PLUS, MAQUEEN PLUS V2, MAQUEEN PLUS V3 |
TigerJython unterstützt auch die Modelle Plus, PlusV2 und PlusV3. Alle Musterbeispiele und Aufgaben in diesem Lehrgang können auch mit diesen Robotern ausgeführt werden. Leider ist die Hardware dieser Maqueen-Roboter unterschiedlich und es sind daher 4 verschiedene Bibliotheken (Module) erforderlich. Die Module mbrobot und mbrobot_plusV2 werden beim Flashen vom micro:bit automatisch auf den micro:bit kopiert. Die Module mbrobot_plus bzw. mbrobot_plusV3musst du zusätzlich auf den micro:bit herunterladen. Dabei gehst du wie folgt vor:
Der Roboter fährtl 2000 Millisekunden geradeaus. Du kannst jeder Zeit die neueste Version der Robotik-Module downloaden und auf den micro:bit kopieren. Alle mbrobot Module findest du auch unter den Zusatzmodulen (TigerJython /Hilfe/APLU Dokumentation / microbit /Zusatzmodule). |
![]()
Fachliche Hinweise:
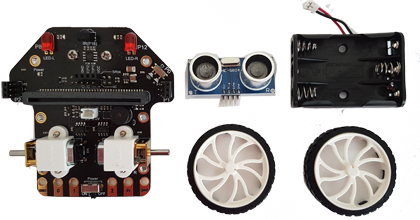
Maqueen Bausatz
(Bezugsquellen: bastelgarage.ch, www.mouser.ch, www.educatec.ch )
|
Zusätzlich muss man einen micro:bit und drei AA (1.5 V) Batterien beschaffen. Bei den aufladbaren Batterien sollte man unbedingt Nickel-Zink-Batterien wählen, da nur diese 1.5 V abgeben..
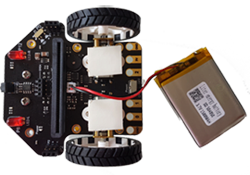
Wir empfehlen, anstelle der drei Baterien, eine Lipo-Akku-Batterie (3.7 V, 1.5 Ah) zu beschaffen und diese an den Motoren mit einem doppelseitigen Klebband zu befestigen.
Bezugsquelle: www.bastelgarage.ch.
Die flache Lipo-Batterie ist insbesondere dann vorteilhaft, wenn man den Roboter später für die Verwendung von IoT mit einem ESP 32 Coprozessor ergänzen will.
 |
 |
micro:bit V1 mit MacOS flashen
MacOS kann mit Tools / Flash Target nicht automatisch die Versionen V1 und V2 unterscheiden. Falls Sie noch die alte Version des micro:bis haben, gibt es zwei Möglichkeiten, ihn zu flashen:
1) Sie flashen ihr micro:bit V1 auf einem Windows Computer. Dann können Sie weiter normal auf dem Mac-Rechner arbeiten. Alles andere funktioniert problemlos.
2) Sie laden eine TigerJython-Version herunter, die micro:bit V1 aber nicht micro:bit V2 flashen kann:
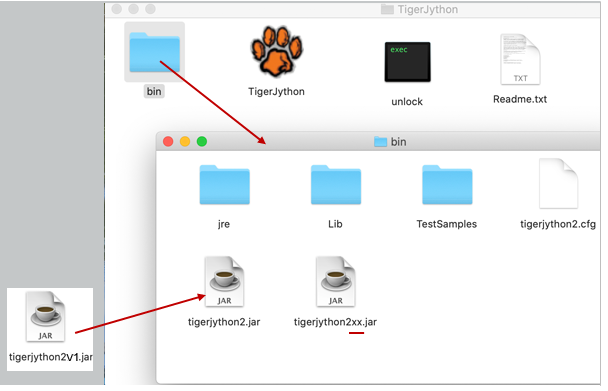
- Laden Sie die Datei tigerjython2V1.jar herunter Download
- Öffnen Sie das Unterverzeichnis /bin des Installationsverzeichnisse und umbenennen Sie die darin enthaltene Datei tigerjython2.jar z.B in tigerjython2xx.jar, um diese eventuell später wieder verwenden zu können
- Kopieren Sie die heruntergeladenen Datei in den Ordner bin und umbenennen Sie in tigerjython2.jar
- Starte Sie TigerJython und flashen Sie Ihr micro:bit V1. Sie können weiter mit dieser Version arbeiten. Die andere Version brauchen Sie nur wenn Sie einen mico:bit V2 flashen möchten.
Fachliche Hinweise:
micro:bit V1 hat sehr wenig Speicherplatz. Mit der älteren Version der mbrobot-Bibliothek funktioniert alles bis auf die Kalibrierung der Motoren.
Um die ältere Bibliothek zu verwenden gehst du wie folgt vor:
- Installiere die Firmware nach der Beschreibung im nächsten Abschnitt
- Beim Flaschen wird die neue Bibliothek mbrobot.py automatisch auf den micro:bit kopiert
- Du muss danachdiese mit der alten Version ersetzen
- Lade die Datei mbrobotV1.zip herunter und packe sie aus
- Öffne die Datei mbrobot.py im TigerJython-Editor
- Wähle unter Tools die Option Modul herunterladen
- mbrobot.py wird auf deinen micro:bit heruntergeladen und ersetzt die grössere Datei
- Jetzt hast du auf deinem micro:bit V1 Platz für deine Roboterprogramme