| TigerJython4Kids | HomeTurtlegrafikRobotikDatenbanken |
Forum
| Deutsch English |
6. BUTTONS & SOUND
![]()
DU LERNST HIER... |
wie man die beiden micro:bit-Buttons verwendet, um interaktive Programme zu entwickeln. Zusätzlich lernst du, wie du mit deinem Roboter Sound abspielen kannst. |
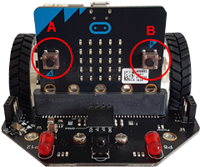
WIE FUNKTIONIEREN DIE BUTTONS |
|
MUSTERBEISPIELE |
Die Befehle für die Buttons sind im Modul microbit, das du zusätzlich importieren musst. Beispiel 2: Beim Klicken eines Buttons wird Sound abgespielt Mit einem Klick auf den Button A oder B soll eine kurze Melodie abgespielt werden. Die Funktion button_a.was_pressed() gibt True zurück, wenn der Button a kurz gedrückt wurde.
from microbit import * from mbrobot import * #from mbrobot_plusV2 import * from music import * repeat: if button_a.was_pressed(): play(JUMP_UP) if button_b.was_pressed(): play(JUMP_DOWN) Das Modul music kann nur im Realmodus importiert werden. Zum Testen Im Simulationmodus kannst du diese Importzeile auskommentieren und den Befehl playTone(440, 1000) verwenden (440 ist di Tonfrequenz, 1000 die Abspieldauer in ms) Beispiel 3: Ein Programm mit Button abbrechen
from microbit import * from mbrobot import * #from mbrobot_plus import * setSpeed(15) forward() while not button_a.was_pressed(): d = getDistance() if d < 10: backward() delay(1000) forward() delay(200) stop() Beispiel 4: Den Roboter mit Buttons steuern
from microbit import * from mbrobot import * #from mbrobot_plus import * RobotContext.useBackground("sprites/bg.gif") RobotContext.setStartPosition(310, 460) forward() repeat: v = irLeft.read_digital() if v == 0: backward() delay(500) stop() if button_a.was_pressed(): left() delay(550) forward() elif button_b.was_pressed(): right() delay(550) forward() sleep(10) |



MERKE DIR... |
Mit Buttons kannst du interaktive Programme entwickeln. Die Funktion is_pressed() gibt True zurück, wenn der Button gedrückt ist. Die Funktion was_pressed() gibt True zurück, wenn seit dem Start des Programms oder seit dem letzten Aufruf irgendwann mal geklickt wurde. |
ZUM SELBST LÖSEN |
|
![]()
Fachliche Hinweise:
Melodien, die Modul music eingebaut sind (nur Realmodus):
ADADADUM - Eröffnung von Beethoven 5. Sinfonie in C Moll
ENTERTAINER - Scott Joplin Ragtime Klassiker
PRELUDE -J.S.Bach 48 Preludien und Fugen
ODE - Ode an Joy Thema aus Beethoven 9. Sinfonie in D Moll
NYAN - das Nyan Cat Thema
RINGTONE - ein Klingelton
FUNK - ein Geräusch für Geheimagente
n
BLUES - ein Boogie-Woogie Blues
BIRTHDAY - Happy Birthday to You...
WEDDING - der Chorus des Bräutigams aus Wagner Oper Lohengrin
FUNERAL - der Trauerzug, Chopin Klaviersonate
PUNCHLINE - a lustiger Tonclip, nachdem ein Witz gemacht wurde
PYTHON - aus Monty Python Flying Circus
BADDY - Filmclip aus The Baddy
CHASE - Filmclick aus einer Jagdszene
BA_DING - ein Signalton, der darauf hinweist, dass etwas geschehen ist
WAWAWAWAA - ein trauriger Posaunenklang
JUMP_UP - für Spiele, um auf eine Aufwärtsbewegung hinzuweisen
JUMP_DOWN - für Spiele, um auf eine Abwärtsbewegung hinzuweisen
POWER_UP - ein Fanfarenklang
POWER_DOWN - ein trauriger Fanfarenklang, wenn etwas verloren gegangen ist